|
Rube Goldberg Machine 1.0
This is the base code for Rube Goldberg designed for the CS296 Software Systems Lab
|
|
Rube Goldberg Machine 1.0
This is the base code for Rube Goldberg designed for the CS296 Software Systems Lab
|
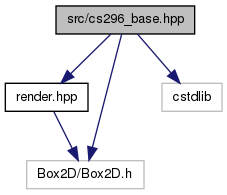
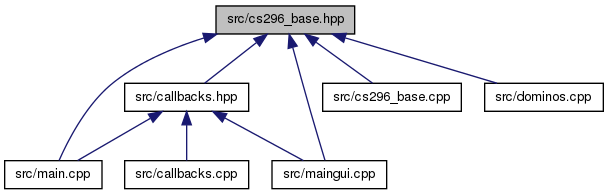
Go to the source code of this file.
Classes | |
| struct | cs296::settings_t |
| Simulation settings. Some can be controlled in the GUI. More... | |
| struct | cs296::sim_t |
| the sim_t stores a string and object pointer to base_sim_t More... | |
| struct | cs296::contact_point_t |
| The contact_point_t stores contact point. More... | |
| class | cs296::base_sim_t |
| the base_sim_t class is used to simulate the Box2D world. inherited from the b2ContactListener. More... | |
Namespaces | |
| namespace | cs296 |
These are user defined include files Included in double quotes - the path to find these has to be given at compile time. | |
Defines | |
| #define | RAND_LIMIT 32767 |
Typedefs | |
| typedef base_sim_t * | cs296::sim_create_fcn () |
| Why do we use a typedef? Creates a new datatype. sim_create_fcn() acts as a pointer datatype to base_sim_t class. | |
Variables | |
| sim_t * | cs296::sim = new sim_t("Dominos", dominos_t::create) |
| const int32 | cs296::k_max_contact_points = 2048 |
| #define RAND_LIMIT 32767 |
Definition at line 33 of file cs296_base.hpp.
 1.7.4
1.7.4

